命令軸組從工具中心點的目前位置開始進行螺旋插補運動。終點和輔助點被絕對定義在指定的座標系統中(終點和輔助點的定義取決於所選的 CircMode 模式)。
命名空間:IntervalZero.KINGSTAR.Base.Class組合: IntervalZero.KINGSTAR.Base.Class (於 IntervalZero.KINGSTAR.Base.dll) 版本:4.4.0.0
語法
IMoveHelicalCommand MoveHelicalAbsolute(
McCircMode circMode,
double[] auxPoint,
double[] endPoint,
McCircPathChoice pathChoice,
double depth,
double pitch,
double velocity,
double acceleration,
double deceleration,
double jerk,
McCoordSystem coordSystem,
McBufferMode bufferMode,
McTransitionMode transitionMode,
double[] transitionParameter
)Function MoveHelicalAbsolute(
circMode As McCircMode,
auxPoint As Double(),
endPoint As Double(),
pathChoice As McCircPathChoice,
depth As Double,
pitch As Double,
velocity As Double,
acceleration As Double,
deceleration As Double,
jerk As Double,
coordSystem As McCoordSystem,
bufferMode As McBufferMode,
transitionMode As McTransitionMode,
transitionParameter As Double()
)As IMoveHelicalCommand參數
circMode
型別:McCircMode
指定輸入訊號 AuxPoint 的定義。
auxPoint
型別:double[]
指定座標系統中各維度的絕對位置陣列,最大為 64。
endPoint
型別:double[]
指定座標系統中各維度的絕對位置陣列,最大為 64。
pathChoice
路徑的選擇。
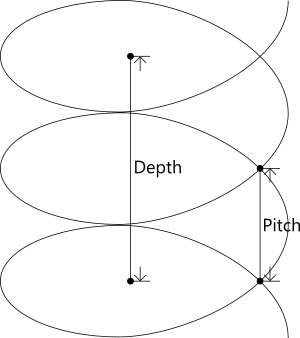
depth
型別:double
螺旋高度。
pitch
型別:double
一個完整螺旋圈的高度。
velocity
型別:double
在定義路徑的座標系統中,該路徑的最大速度;永遠為正值,非必要到達。[單位/秒]
acceleration
型別:double
最大加速度;永遠為正值,非必要到達。單位取決於 McProfileType。[單位/秒2] 或 [秒]
deceleration
型別:double
最大減速度;永遠為正值,非必要到達。單位取決於 McProfileType。[單位/秒2] 或 [秒]
jerk
型別:double
最大加加速度;永遠為正值,非必要到達。單位取決於 McProfileType。[單位/秒3] 或 [秒]
coordSystem
座標系統。
bufferMode
型別:McBufferMode
定義方法的時間順序。
transitionMode
插入一個轉換曲線。
transitionParameter
型別:double[]
轉換模式的附加參數,若將 TransitionMode 設為 mcNone,則此參數無效。
回傳值
回傳一個螺旋移動狀態。
備註
- 更多關於絕對、相對與附加的運作方式請見:運動。
- 更多關於軸如何在 McCircMode 模式中移動的資訊請見:McCircMode。
- Depth 與 Pitch 參數如下圖所示:
- 插補的速度為切線速度。
| 順時鐘路徑 | 逆時鐘路徑 |
|---|---|
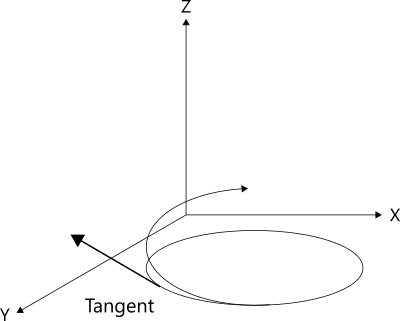 | 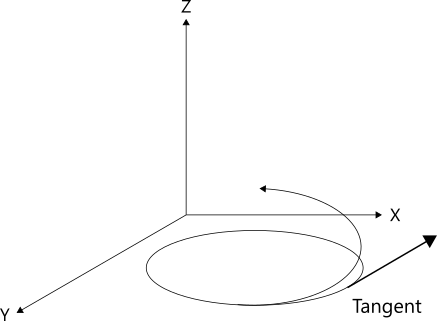 |
參見